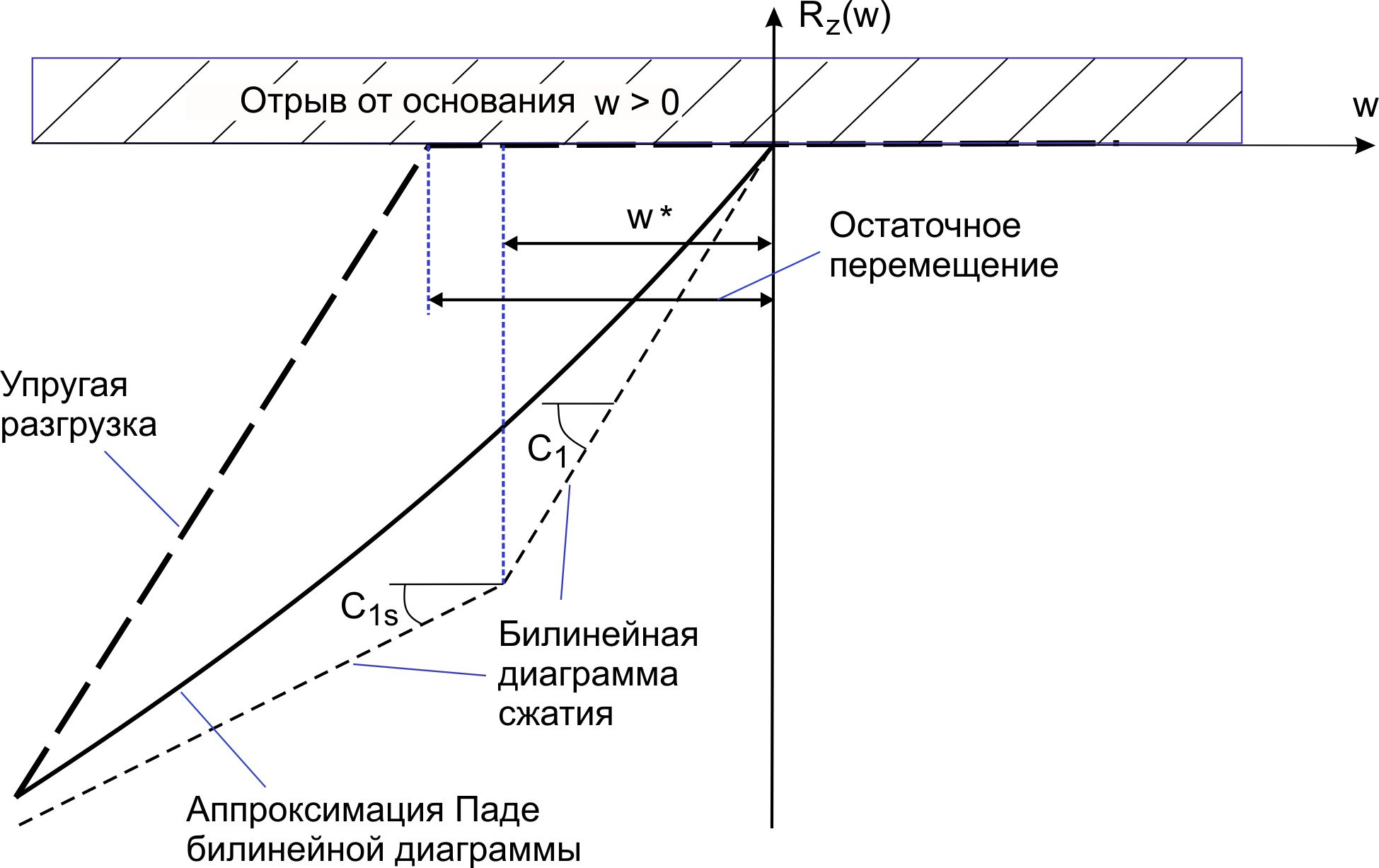
Задание неупругого основания возможно только для физически нелинейных конечных элементов 441, 442 и 444 типов. Поведение неупругого основания иллюстрируется диаграммой, представленной на рис. 1. Здесь Rz – реакция основания, направленная по нормали к срединной поверхности плоского оболочечного конечного элемента (оси стержневого конечного элемента), w – перемещение, нормальное к срединной поверхности плоского оболочечного конечного элемента (оси Oz стержневого конечного элемента).
Рис. 1. Диаграмма Rz(w)(нормальная реакция основания – нормальное перемещение)
Параметры C1, C1s, w* однозначно задают билинейную диаграмму Rz = Rz(w), служащую для построения аппроксимации Паде. Путь ОР соответствует активному нагружению, точка Р – началу упругой разгрузки, точка А – началу отрыва плоского оболочечного конечного элемента (стержневого конечного элемента) от основания, а отрезок АО – остаточному перемещению.
В случае упругого основания с учетом отрыва следует задать параметр C1s как можно ближе к C1, а параметр w* – как можно больше. Например, если C1 = 400 MN/m3, то C1s = 399.99 MN/m1 и w* = 10 м. Тогда аппроксимация Паде в интересующих нас границах будет очень близка к прямой R(w) = C1w. В случае упругого основания без учета отрыва следует задать С1 = С1s.
Физическая модель неупругого основания в касательной к срединной поверхности оболочечного элемента плоскости представлена на рис. 2.
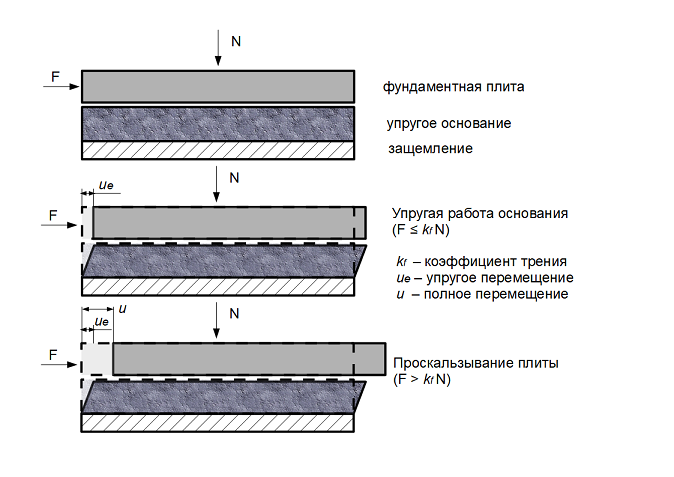
Рис. 2. Физическая модель неупругого основания, работающего в касательной плоскости. Здесь N – нормальное к срединной поверхности плиты усилие, F – боковое усилие.
Реакция неупругого основания в касательной плоскости определяется следующим образом:
\[R_{x} =\left\{\begin{array}{c} {C_{1uv} u,\quad R_{\tau } \le \left|k_{f} R_{z} \right|} \\ {\frac{\left|k_{f} R_{z} \right|}{R_{\tau } } \cdot R_{x} ,\quad R_{\tau } >\left|k_{f} R_{z} \right|} \end{array}\right. ,\quad R_{\tau } =\sqrt{R_{x}^{2} +R_{y}^{2} } ,\quad x\leftrightarrow y\]
Здесь Rx, Ry – проекции реакции основания на оси локальной системы координат конечного элемента, Rτ – распределенное по поверхности напряжение, kf – коэффициент трения.
Специальный диалог служит для задания параметров неупругого основания.
Если выбрать тип основания «Нелинейный», то открываются окна для задания параметров C1, C1s, w*, описывающие работу неупругого основания в направлении нормали к срединной поверхности конечного элемента плиты, причем C1 > C1s, w* < 0. Параметры C1uv и коэффициент трения kf описывают работу неупругого основания в касательной к срединной поверхности плиты плоскости. Обращаем внимание, что величина нормального усилия N может зависеть от времени τ, а в случае отрыва плиты от основания обращается в ноль, что приведет к отсутствию горизонтальной и вертикальной реакций основания. Чтобы сделать невозможным проскальзывание плиты в горизонтальной плоскости, следует задать коэффициент трения порядка 1050. Однако в случае отрыва плиты от основания проскальзывание все равно будет, поскольку Rz = 0 → Rx = Ry = 0.
Если выбрать тип основания «изотропный», то окно для w исчезнет, а параметр C2 будет проигнорирован. В этом случае задается модель упругого винклеровского основания без учета отрыва и проскальзывания.
Задание данных описано в разделе Назначение коэффициентов упругого основания.
На рис. 3 в качестве примера приведена расчетная модель квадратной железобетонной плиты, покоящейся на неупругом основании с параметрами С1 = 400 MN/m3, C1s = 200 MН/м3, w = – 0.01 м, C1uv = 0, kf = 0, приведенными на рис. 2, и нагруженной собственным весом и узловыми сосредоточенными силами, моделирующими нагрузку от стен. Зависимость контурных сил от времени представляет собой циклическое нагружение и приведена на этом же рисунке. Собственный вес прикладывается в течение первой секунды (линейная зависимость от времени) и далее остается постоянным. Поведение бетона описывается теорией пластического течения при использовании поверхности текучести Гениева, а поведение арматуры – законом течения Фон Мизеса с учетом эффекта Баушингера. Для решения задачи используется прямое интегрирование уравнений движения, применяется явная разностная схема. Для подавления незначительных осцилляций, возникающих при медленном приложении нагрузки, вводится демпфирование, пропорциональное диагональной матрице масс.
На рис. 4 показаны вертикальные перемещения угла плиты (узел 1) и ее центра (узел 63), причем отрыв центральной части плиты от основания происходит с самого начала приложения нагрузки.
На рис. 5 показана зависимость нормальной к срединной поверхности плиты реакции основания, приложенной в окрестности точки Гаусса №1 углового конечного элемента. Горизонтальные участки кривой при R = 0 соответствуют отрыву плиты от основания в моменты времени, когда контурные силы обращаются в ноль (отрезки времени [4, 5] сек и [7, 8] сек).
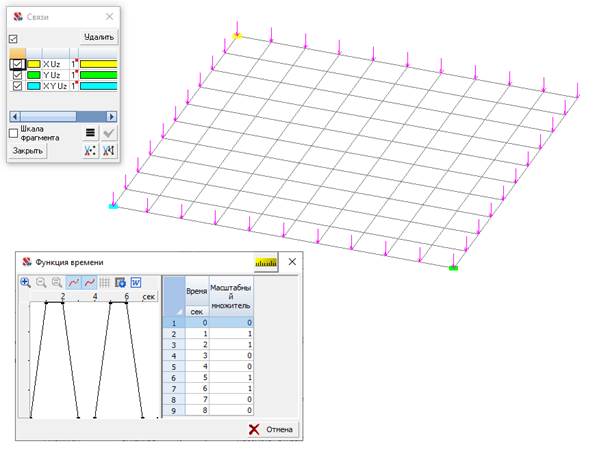
Рис. 3. Расчетная модель плиты на неупругом основании
Рис. 4. Нормальные перемещения узла 1 (угол плиты) и узла 63 (центр плиты) во времени
Рис. 5. Нормальная реакция основания, приложенная к угловому конечному элементу в точке Гаусса №1
Данный рисунок демонстрирует накопление остаточных перемещений основания в процессе циклического нагружения.
Данная опция реализована только для нелинейного динамического анализа и предназначена прежде всего для сейсмического анализа сооружений. Для упрощения понимания проблемы рассмотрим сначала классическую формулировку задачи изгиба балки на упругом основании. На основании принципа возможных перемещений получим:
| \[\int _{0}^{a}EI\frac{d^{2} w}{dx^{2} } \delta \frac{d^{2} w}{dx^{2} } dx+\int _{0}^{a}kw\delta wdx -\int _{0}^{a}q\delta wdx =0,\] | (1) |
где E – модуль упругости материала балки, I – момент инерции поперечного сечения, a – длина балки, k – коэффициент постели упругого основания, q – поперечная нагрузка, распределенная по длине балки, w – нормальный прогиб. Первый интеграл в (1) представляет собой виртуальную работу изгибающего момента на изменении кривизны, второй – виртуальную работу реакции упругого основания, распределенного вдоль оси балки, на нормальном перемещении w, а третий – виртуальную работу внешних сил. Интегрируя первый интеграл два раза по частям и учитывая произвольность вариации δw, получим известное дифференциальное уравнение изгиба балки на упругом основании
| \[EI\frac{d^{4} w}{dx^{4} } +kw=q\] | (2) |
и естественные граничные условия.
Если задать по всей длине балки вынужденные перемещения we, то в выражении (1) w = we, δwe = δ(d2we/dx2) = 0, и дифференциальное уравнение (2) исчезает, поскольку прогиб w известен. Таким образом, классическая постановка задачи об изгибе балки на упругом основании не учитывает возможности задания заданных перемещений по длине балки, поскольку отождествляет перемещение оси w и заданные перемещения we.
В предлагаемом подходе мы полагаем, что перемещение оси балки w(x, t) и заданные перемещения упругого основания we(x, t) – это две разные функции, причем функция we(x, t) известна, а функция w(x, t) является искомой. Здесь t – время. Тогда принцип возможных перемещений представляется следующим образом:
| \[\int _{0}^{a}EI\frac{d^{2} w}{dx^{2} } \delta \frac{d^{2} w}{dx^{2} } dx+\int _{0}^{a}k\left(w-w_{e} \right)\delta wdx -\int _{0}^{a}q\delta wdx =0.\] | (3) |
Мы полагаем, что изгибающий момент совершает работу на изменении кривизны оси балки, внешние силы – на вертикальном перемещении, а реакция упругого основания – на разности искомых и заданных перемещений. Дважды интегрируя первый интеграл по частям и применяя принцип произвольности вариации δw, получаем
| \[EI\frac{d^{4} w}{dx^{4} } +kw=q+kw_{e} \] | (4) |
Предлагаемая формулировка задачи (3), (4) позволяет учесть заданные перемещения. В случае отсутствия последних (we = 0) мы приходим к классической формулировке (1), (2).
Представленная постановка задачи полностью переносится на физически и геометрически нелинейные пластины на податливом основании и заставляет отказаться от традиционной техники задания вынужденных перемещений в строительной механике, основанной на наложении связей (опор) на узлы, в которых задаются вынужденные перемещения, по направлению последних. Такое наложение связей «убивает» податливое основание, реакция которого воспринимается нагружающим устройством, реализующим заданные перемещения. В текущей версии SCAD++ отсутствуют элементы интерфейса, позволяющие в полном объеме реализовать подход (3), (4). Для того, чтобы обойти указанные трудности и создать расчетную модель, одновременно учитывающую заданные перемещения и податливое основание, в рамках существующего инструментария SCAD++ используется следующий подход.
Сказанное выше иллюстрируется следующим примером (рис. 6).
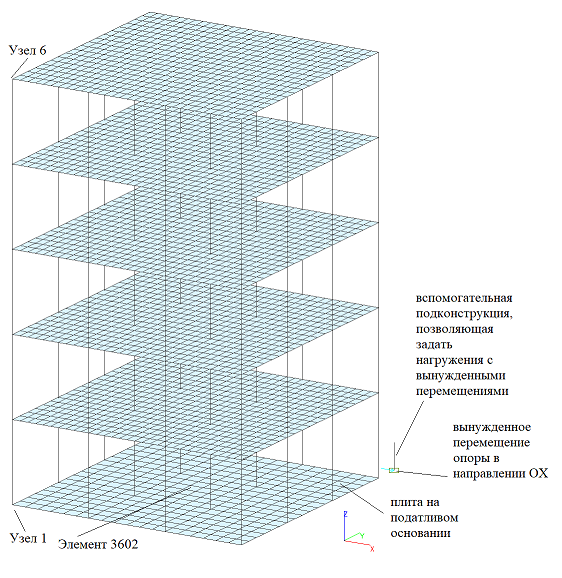
Рис. 6. Расчетная модель здания, опирающегося на плиту с податливым основанием.
Представленная расчетная модель включает физически нелинейные оболочечные конечные элементы 444 типа и стержневые конечные элементы 405 типа. Для бетона используется теория пластического течения (поверхность текучести Гениева), а для арматуры – теория пластического течения фон Мизеса. Деградация бетона растянутой и сжатой зон моделируется с использованием параметра повреждаемости. И для стержней, и для оболочечных C1 = 1000 MN/m3, C1S = 900 MN/ m3, w = – 0.1 m, C1UV = 500 MN/ m3, kf = 0.5.
Конструкция нагружена собственным весом. Созданы три нагружения: ImpX, ImpY и ImpZ, представляющие собой единичные смещения всех узлов фундаментной плиты вдоль оси OX, OY и OZ соответственно. От нуля до 1 секунды прикладывается статическая нагрузка (собственный вес), при этом все вынужденные смещения равны нулю – см. рис. 7. Затем постоянная нагрузка остается неизменной, зато прикладываются вынужденные перемещения. Перемещения контрольного узла 6 в направлении конечных элементов учитывают геометрическую нелинейность. Толщина плит перекрытий принимается 0.26 м, а толщина фундаментной плиты – 0.8 м. Вертикальные перемещения отличаются мало. Горизонтальные перемещения при учете проскальзывания фундаментной плиты примерно в 2.9 раза меньше, чем в случае упругого основания.
На рис. 11 показаны реакции Rx, Ry и Rz неупругого основания, а на рис. 12 – реакции Rx, Ry и Rz упругого основания конечного элемента 3602, расположенного в центре фундаментной плиты. В случае упругого основания величины всех трех реакций оказались близки, поэтому на соответствующем графике видна одна кривая. Максимальное значение реакций Rx и Ry для упругого основания оказались более чем в два раза большими, чем для неупругого.
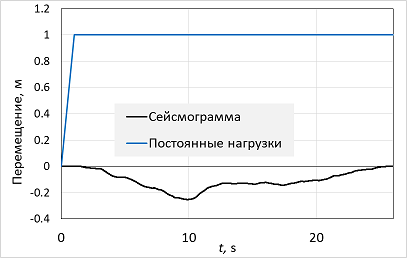
Рис. 7. Функции времени для сейсмического воздействия (сейсмограмма) и постоянной нагрузки
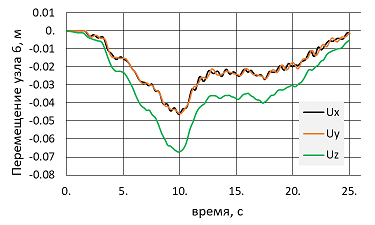
Рис. 9. Перемещения узла 6 во времени. Неупругое основание
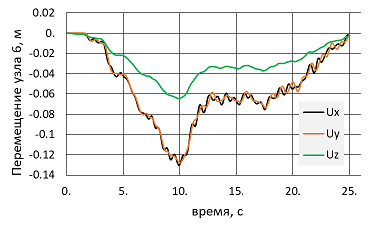
Рис. 10. Перемещения узла 6 во времени. Упругое основание
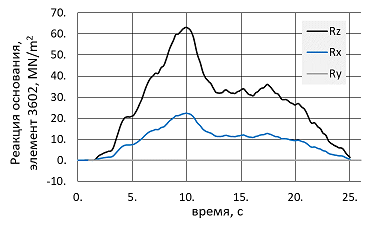
Рис. 11. Реакция Rx, Ry, Rz во времени. Неупругое основание
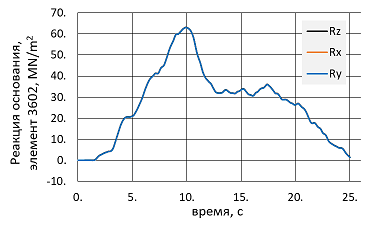
Рис. 12. Реакция Rx, Ry, Rz во времени. Упругое основание
При использовании твердых тел на узлах slave нельзя задавать вынужденных перемещений, поскольку возникают противоречивые кинематические ограничения. С одной стороны, расстояние между узлом master и узлом slave должно быть неизменным согласно определению абсолютно твердого тела. С другой стороны, задание в узле slave вынужденных перемещений, как правило, вступает в противоречие с предыдущим условием.
При автоматической генерации вынужденных перемещений в узлах плит, находящихся на податливом основании, этот факт учитывается, и вынужденные перемещения на узлах slave не назначаются. Перемещения узла slave полностью определяются перемещениями узла master, расположенного на фундаментной плите. Если же будут обнаружены узлы slave, для которых узел master не относится к фундаментной плите и в которых пользователем назначены заданные перемещения, то пользователь получит сообщение об ошибке на этапе выполнения задания. Последнее относится к модулю нелинейной динамики.